Hi I have only used the Robot Operating System (ROS) for several small things so I wanted to review a book on learning ROS both so that I could learn more about ROS and because ROS is increasingly being used for more robotics applications and is good for all of us to become familiar with […]
Hi all I am going to take a break from the technical to discuss how to run a project. During my career I have experienced several project managers and have heard from many others about their project managers. Here is my distilled list of how to run a technology (and just about any other) project. […]
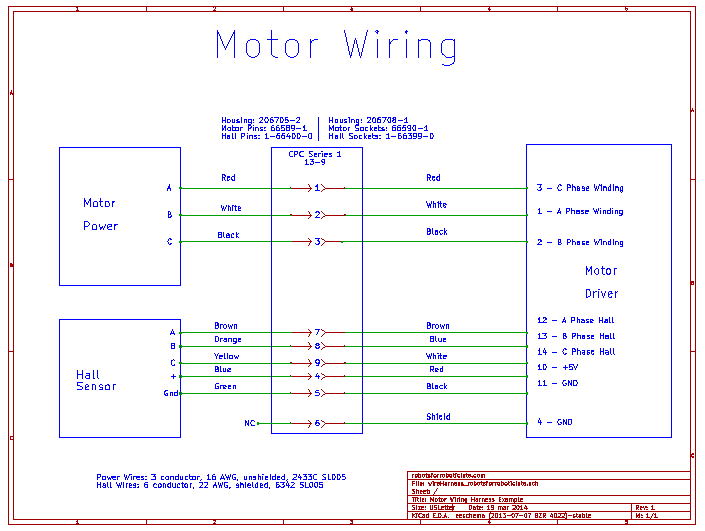
(See full size wire harness diagram here) Hi all So it is time to think about wiring up your robot, one of the key steps before you begin is to develop a wiring diagram. A wiring diagram is not only needed for wiring the robot but is also a valuable resource to have if you […]
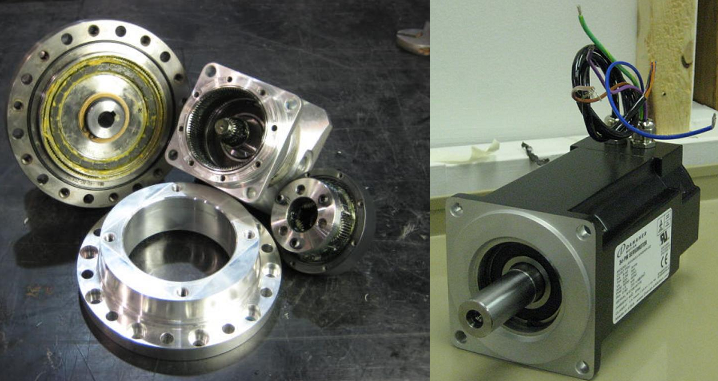
Hi all Selecting a motor is a critical task when designing a robot. In a prior post we discussed the different types of motors and feedback options as well as how to control those motors. In this post we will focus on how to size your motor and select the proper gearing. In the main […]
Hi all I have received a lot of questions from friends and family about the Amazon Prime Air delivery (if you have not heard about this check out the video at the bottom of this post). I know for some this is old news, but I am talking about it anyway. The basic idea is […]
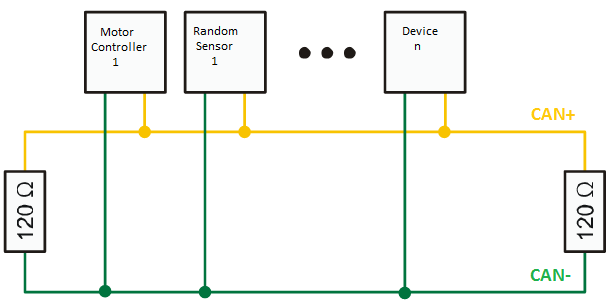
A Controller Area Network, or CAN for short is a common message based protocol used in cars and other vehicles. If you are trying to interface with a car/truck/bulldozer, there is a good chance that you will be reading data its CAN bus, and sending it commands via its CAN bus. It is also used […]
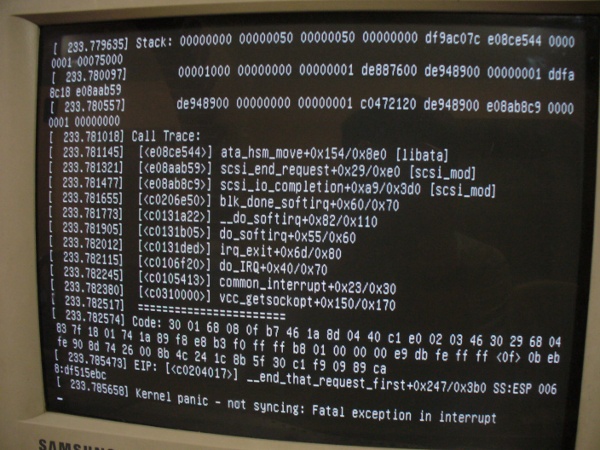
Hi all Most robots have a computer inside that is responsible for controlling the robot. Many robots will have multiple computers, each responsible for a different part of the robot. How do you make sure that the operating system and possibly the software that runs the robot does not get corrupt (and avoid kernel panics)? […]
Hi all Here is a book review on Peter Corke’s Robotics, Vision and Control, published in 2011 (and 2013). I decided to review this book since it has a lot of Matlab code (I know I complain about Matlab later on) and examples that *could* be useful when developing real systems, testing a specific algorithm, […]
This is part of a series of posts talking about some of the common LIDAR’s used in robotics. At the end of these sensor profile articles there will be a final post that compares the sensors based on data collected by each of the sensors. Posts: Evaluating LIDAR Guide LIDAR Fundamentals SICK TiM551 – LIDAR […]
Hi all This is going to be a quick post. There are many cases where instead of building a full robot from scratch, you just want to buy a platform. These platforms can serve as the base of your robot that you build upon, or just as a test platform for developing/testing new software with. […]
When you are in the middle of nowhere how can you get online? Often while working with robots you must travel to remote locations with no wired (copper/fiber) internet connection or wifi. In these cases you have two primary ways to get online. When I say “you” it can really be either you or the […]
Hi all There are many people who are familiar with setting up a home network, but now lets look at how to setup a network on your robot. There are two parts to setting up a network; the hardware and the software. This post will go into both of those topics. Before I begin to […]
Hi all For some people debugging comes natural, and they will think that this entire article is obvious, however to many people I hope that this guide will help them become better at debugging systems. If you are one of those people who is an expert debugger (which comes from experience), it is often hard […]
Hi all There are many ways of expressing your position in the world. We can use those same methods to represent where in the world your robot is. At the highest level there are two types of coordinate frames; global and local. In the global frame the robots position is specified based on a pre-established […]
Ahh. Connectors. We love them and we hate them. When you wire a robot there are many places where it can be tempting to take shortcuts to save time and money. Unfortunately connectors often suffer and lose that battle. From experience and many field tests I can not stress the importance of choosing proper connectors […]
Hi all Here is a post describing how to get absolute position for your robot. It discusses the basic methods and then ways to assist them for better accuracy. GPS GPS (or Global Positioning System as those in the know call it) is a widely used technology. It is not the “GPS” that you have […]
Hi allThis is just a quick post on how to increase the range of your wireless communication system. There are several ways to do it and they mostly apply no matter what frequency you are using. We will discuss several ways to do this below. We will also discuss some of the legal limits for […]
This post is part of a series on testing robots with a focus on field testing. It will start with why we test robots, work its way through planning for a field test, to performing the test, and finally what to do after the test. We will conclude with a description of many common tests […]
This post is part of a series on testing robots with a focus on field testing. It will start with why we test robots, work its way through planning for a field test, to performing the test, and finally what to do after the test. We will conclude with a description of many common tests […]
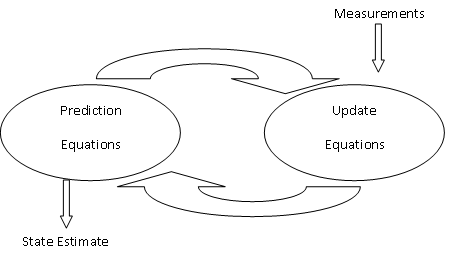
Hi all Here is a quick tutorial for implementing a Kalman Filter. I originally wrote this for a Society Of Robot article several years ago. I have revised this a bit to be clearer and fixed some errors in the initial post. Enjoy! Note: The post has been translated into Russian here and is hosted […]
This post is part of a series on testing robots with a focus on field testing. It will start with why we test robots, work its way through planning for a field test, to performing the test, and finally what to do after the test. We will conclude with a description of many common tests […]
Hi all Time. Don’t you wish you had more of it? If you were a robot you would probably be worrying about having consistent time. Why do we need consistent time? In many robots there are multiple systems/computers that are generating and using data, if the systems/computers are not in sync than the result can […]
This post is part of a series on testing robots with a focus on field testing. It will start with why we test robots, work its way through planning for a field test, to performing the test, and finally what to do after the test. We will conclude with a description of many common tests […]
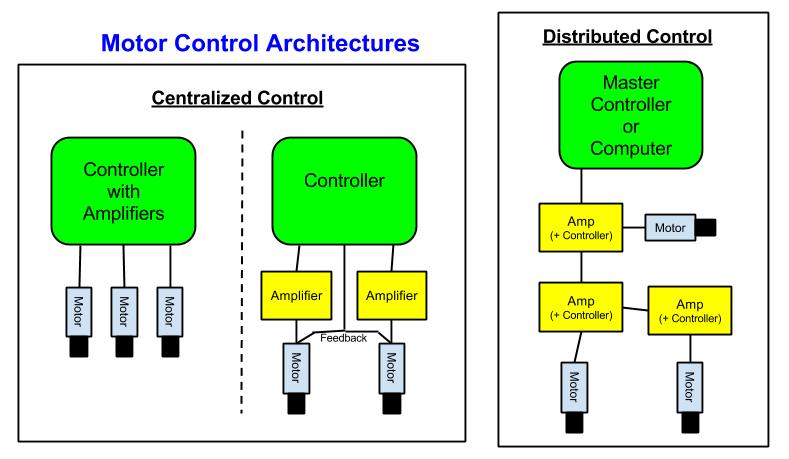
Hi all I recently wrote a post on different types of motors and feedback options, now I want to talk about how to control those motors. Each motor is often refereed to an “axis”, so a 8 axis motor controller can control up to 8 motors. There are two different components used in the control […]
Hi Here at robotsforroboticists.com we wish to change how research papers are presented to the world. As part of that we will accept submissions of papers related to building real robots. We will not accept papers related to things that have not been tested on a robot. Good examples of papers include robot system design, […]
Hi all Remembering to be (and being) safe is an important aspect of building robots. If you are not do things safely, you might not get the chance to build anything else. I am not going to go into the standard stuff such as soldering, machining, and chemical safety since you can get that in […]
This post is part of a series on testing robots with a focus on field testing. It will start with why we test robots, work its way through planning for a field test, to performing the test, and finally what to do after the test. We will conclude with a description of many common tests […]
Hi all Ok, so you read my last post on sensor types (you did, didn’t you? if not check it out here) and you now know which sensor you want to use. How do you choose which sensor option to choose? That is a great question, this post will go into details of the various […]
Hi all There are many different sensor types that can be used on a robot, and most robots will have many different sensor types. I am going to talk about the common types and avoid some of the more application specific sensors such as environmental, radiation and chemical. When I think of sensors I divide […]
This post is part of a series on testing robots with a focus on field testing. It will start with why we test robots, work its way through planning for a field test, to performing the test, and finally what to do after the test. We will conclude with a description of many common tests […]