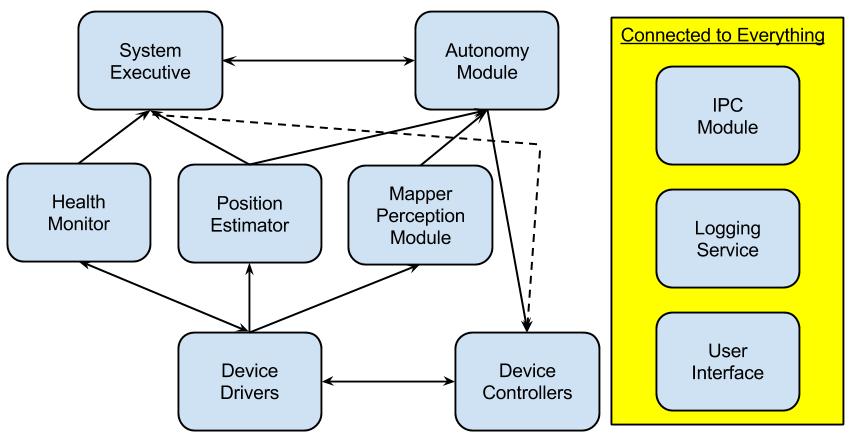
Perception in Smoke, Dust or Fog
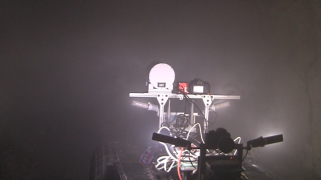
I recently had the fortune to attend a talk titled Multi-Modal Data for Perception in Smoke-Filled Underground Mines by Joe Bartels. It was an interesting talk about pushing sensor technology into difficult environments that can have smoke, dust or fog . The following are notes that I took during the talk, as always I add […]